Общая картина
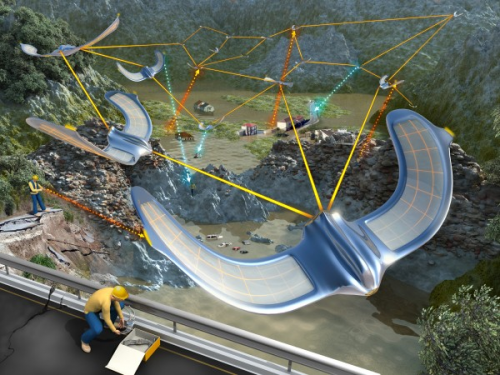
Целью проекта SMAVNET является разработка роя летающих роботов, которые могут быть развернуты в зонах стихийных бедствий для быстрого создания коммуникационной сети для спасателей. Летающие роботы интересны для этих целей потому что они быстры, могут легко преодолевать различные ландшафты и находятся на линии обзора друг друга.
Для того чтобы создать такой рой, роботы и контроллеры должны быть настолько простыми, насколько это возможно.
С точки зрения аппаратного обеспечения, роботы должны быть надежными, безопасными, легкими и дешевыми. Кроме того, протоколы и человеко-машинные интерфейсы должны позволять не специалистами легко и безопасно управлять большими группами роботов.
С точки зрения программного обеспечения, контроллеры позволяют роботам работать совместно. Для роения, роботы реагируют на коммуникационные сообщения от других роботов или спасателей (поведение основанное на коммуникациях). Использование коммуникаций как датчика интересно потому, что большинство летающих роботов обычно оснащаются имеющимися в наличии радио модулями, которые дешевы, легки и имеют большой радиус действия. Кроме того, такая стратегия упрощает алгоритмы роения, которые обычно требуют датчиков основанных на окружающей среде (GPS, камеры) или дороги и тяжелы (лазеры, радары).