Общая картина
Целью проекта SMAVNET является разработка роя летающих роботов, которые могут быть развернуты в зонах стихийных бедствий для быстрого создания коммуникационной сети для спасателей. Летающие роботы интересны для этих целей потому что они быстры, могут легко преодолевать различные ландшафты и находятся на линии обзора друг друга.
Для того чтобы создать такой рой, роботы и контроллеры должны быть настолько простыми, насколько это возможно.
С точки зрения аппаратного обеспечения, роботы должны быть надежными, безопасными, легкими и дешевыми. Кроме того, протоколы и человеко-машинные интерфейсы должны позволять не специалистами легко и безопасно управлять большими группами роботов.
С точки зрения программного обеспечения, контроллеры позволяют роботам работать совместно. Для роения, роботы реагируют на коммуникационные сообщения от других роботов или спасателей (поведение основанное на коммуникациях). Использование коммуникаций как датчика интересно потому, что большинство летающих роботов обычно оснащаются имеющимися в наличии радио модулями, которые дешевы, легки и имеют большой радиус действия. Кроме того, такая стратегия упрощает алгоритмы роения, которые обычно требуют датчиков основанных на окружающей среде (GPS, камеры) или дороги и тяжелы (лазеры, радары).
Робот
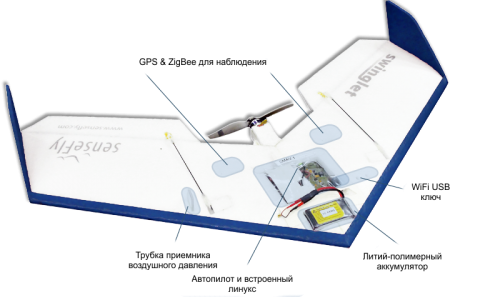
Летающие роботы специально разработаны для безопасных, дешевых и быстро прототипируемых экспериментов по сетям на роях.
Он легкий ( 420 г, размах крыльев 80 см ) и сделан из EPP полипропилена с электрическим двигателем, расположенным в задней части, и двух управляющих поверхностей, выступающих в качестве элевонов ( комбинации элеронов и руля высоты ). Робот работает на литий-полимерном аккумуляторе и имеет автономное время работы около 30 минут. Он оснащен автопилотом, которые контролирует высоту, скорость и частоту обращения. Встроенные в автопилот микроконтроллер использует минималистичную стратегию управления, основанную на данных с 3 датчиков: одного гироскопа и двух датчиков давления.
Контроллер роя реализован в процессорной плате Toradex Colibri PXA270, на которой запущен Linux, соединенный с обычным ключем USB WiFi. Выходные данные этих контроллеров, как например выбранная частота обращения, скорость или высота, отправляются как команды управления в автопилот.
Для того, чтобы записывать траектории полета, робот оснащен GPS модулем u-blox LEA-5H и передатчиком ZigBee (XBee PRO).

Алгоритмы роения
Разработка контроллеров роения сложная задача в виду отсутствия очевидной связи между индивидуальным поведением робота и поведением роя. Поэтому, разработчики обратились к биологии.
В первом приближении, искусственная эволюция использовалась для обнаружения простого и эффективного алгоритма. Хорошо эволюционировавшие контроллеры затем подвергались обратной разработке для вычленения простых и эффективных решений, найденных в процессе эволюции в разработанных контроллерах, которые могут быть поняты и легко смоделированы. В результате полученных контроллеры могут быть адаптированы к различным сценариям понятными способами. Кроме того, они могут быть усовершенствованы для добавления новых приложений. Подвергшиеся обратной разработке контроллеры продемонстрировали различные поведения такие как исследование, синхронизация, покрытие местности и передача информации.
Во втором приближении, вдохновение принесли муравьи, которые могут эффективно организовываться в поиске путей к еде, и создавать пути на феромонах. Эта аналогия использовалась в развертывании и поддержки коммуникационных путей между спасателями и роботами SMAVNET.
Установка роя
В ходе проекта было разработано все необходимое программное и аппаратное обеспечение для проведения экспериментов с 10 летающими роботами. Для общего развития, этот эксперимент из всех проводимых до сего дня вовлек наибольшее количество летающих роботов.
Для быстрого развертывания больших роев, необходимо свести вмешательство оператора до минимума во время калибровки роботов, тестирования и всех фаз полета (запуск, роение, приземление). Поэтому, необходимо повысить до максимума надежность робота, безопасность и автономность, чтобы операторы могли легко проводить эксперименты без заботы о безопасности. В этих экспериментах роботы проводили автоматическую калибровку и самотестирование перед тем, как оператор запускал их. Можно наблюдать и управлять роботами с помощью интерфейса роя, запущенного на одном компьютере.
Критически важный элемент операции - безопасность, она основывается на легкой, мало инерциальной платформе, которая реализует несколько свойств безопасности в программном обеспечении. Среди других вещей, разработчики обратили внимание на избежание столкновений в воздухе с использованием локальных связей и согласования высоты между роботами. Благодаря анализу рисков воздействия земли и столкновений в воздухе с Швейцарским федеральным управлением гражданской авиации (FOCA), разработчики получили официальное разрешение для экспериментов с роем в их местности.
Дополнительные фотографии



Видео
Комментарии
eXeed, 7 окт. 2010, 00:01
Был тут такой минисериал «Хроники Будущего», и там в одной из серий «Ликвидатор» была летающая птичка, которая высматривала преступников и ликвидировала их.
Уж не к этому ли идут подобные разработки.
mrdekk, 7 окт. 2010, 00:04
Возможно и так… Можно начинать параноить :) А вообще — подобные системы могут существенно помочь спасателям в их нелегкой работе. Главное чтобы подобные системы не использовались против населения, а для него. Тогда все будет просто замечательно.
А «Хроники Будущего» это да, интересные мысли озвучиваются там.